Project Overview
The Lane-Line Detection System is a computer vision-based project developed using Python and OpenCV. It is designed to identify and highlight lane lines on roads from input video or image data, utilizing a series of image processing techniques to detect and mark the lanes. The project can be used as a foundational component for driver-assistance systems or autonomous driving applications, where real-time lane detection is critical.
Lane detection is a key feature in self-driving cars, providing the vehicle with spatial awareness of the road structure. This system processes the visual input, applies edge detection, and uses the Hough Line Transform to detect and draw lane lines on the road, all in real-time.
Key Concepts
- Grayscale Conversion: The input image is converted to grayscale to simplify the processing.
- Gaussian Blur: This step reduces noise and details in the image to enhance edge detection.
- Canny Edge Detection: It is used to detect sharp edges, which typically indicate the boundaries of lane lines.
- Region of Interest (ROI): This step focuses on a specific portion of the frame where lane lines are expected, reducing unnecessary computations.
- Hough Line Transform: It is applied to detect straight lines in the edge-detected image, and the detected lines are overlaid on the original frame.
Objective
The primary objective of the Lane-Line Detection System is to accurately detect lane lines in a video stream or image and visually overlay the detected lanes on the original video/image. The system operates in real-time, and can be enhanced or adapted for advanced driver-assistance systems (ADAS) or autonomous vehicle technology.
Motivation
The rise of autonomous driving and smart vehicle technologies demands reliable vision-based systems that can aid in navigation and safety. Detecting lane lines is a fundamental step for self-driving cars, ensuring that the vehicle stays within its designated lane. This project aims to provide an introductory yet powerful implementation of lane detection, which can be built upon to include more sophisticated features like curved lane detection, obstacle avoidance, and vehicle detection.
Technology Stack
- Programming Language: Python 3.x
- Libraries:
- OpenCV: For image processing and computer vision operations.
- NumPy: For numerical computations and array manipulation.
This project serves as a learning experience for students and developers who are exploring computer vision, image processing, and the practical applications of OpenCV. It provides a solid foundation for building more complex systems involved in real-world applications such as driver assistance and autonomous navigation
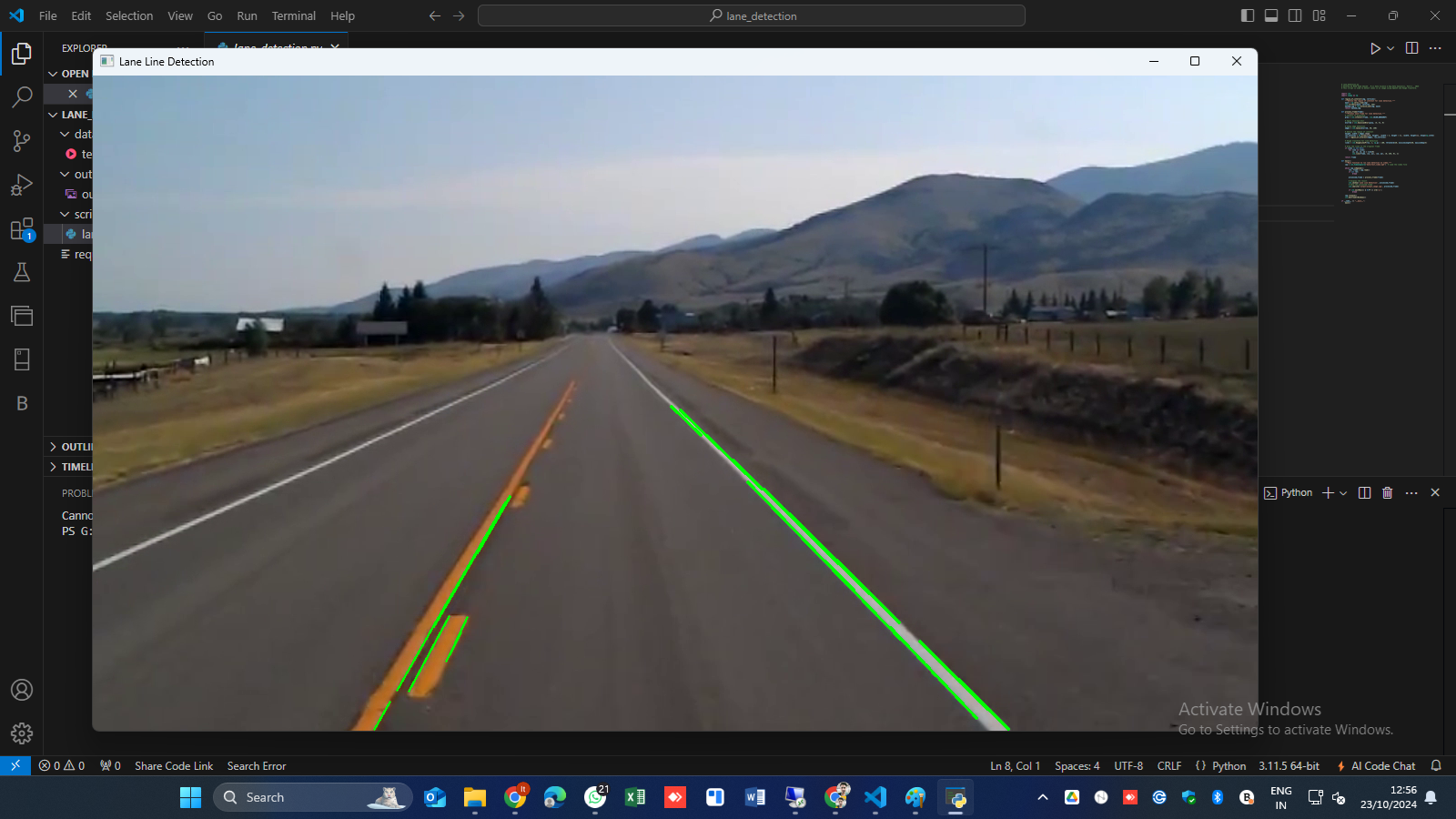
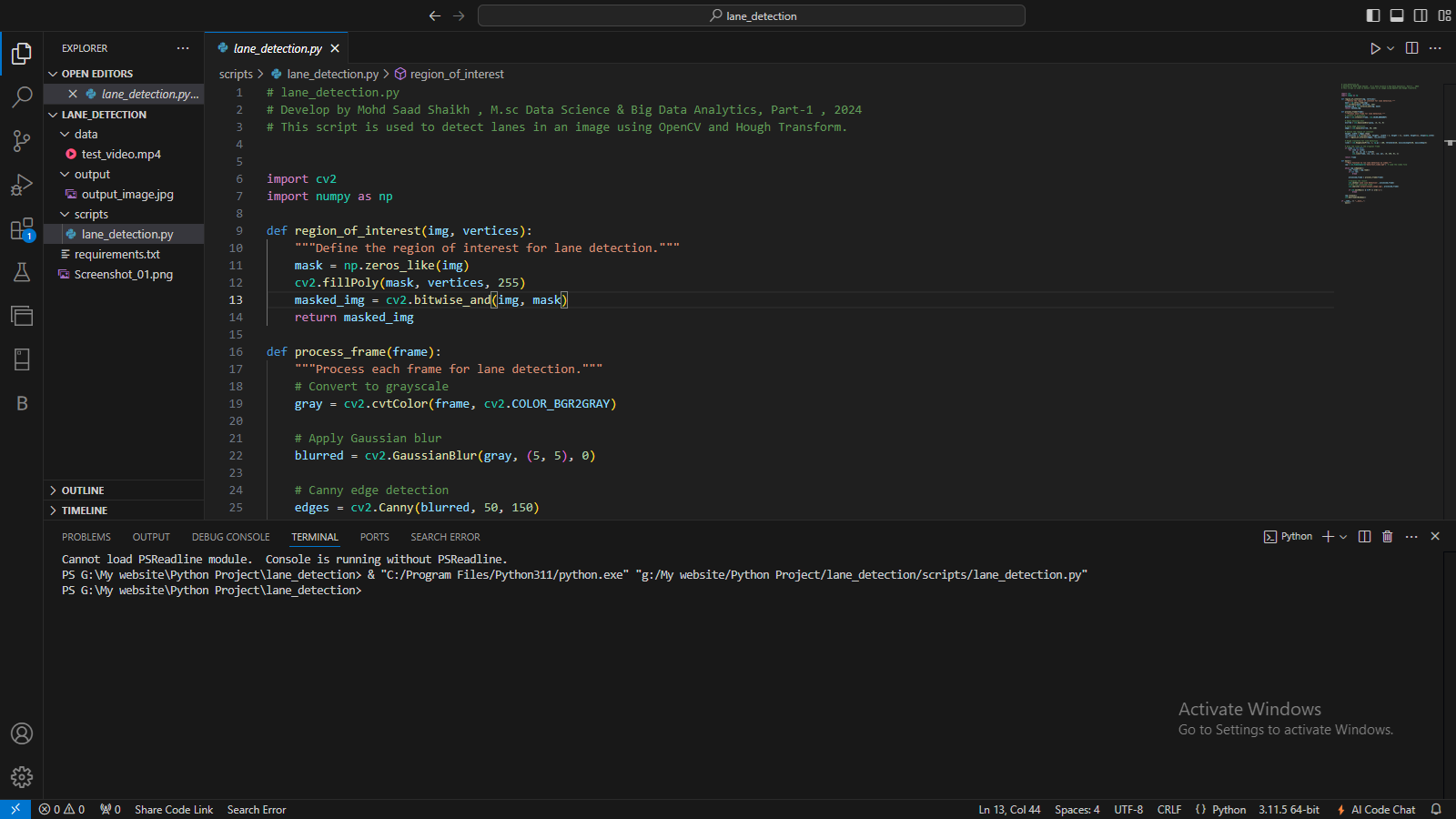
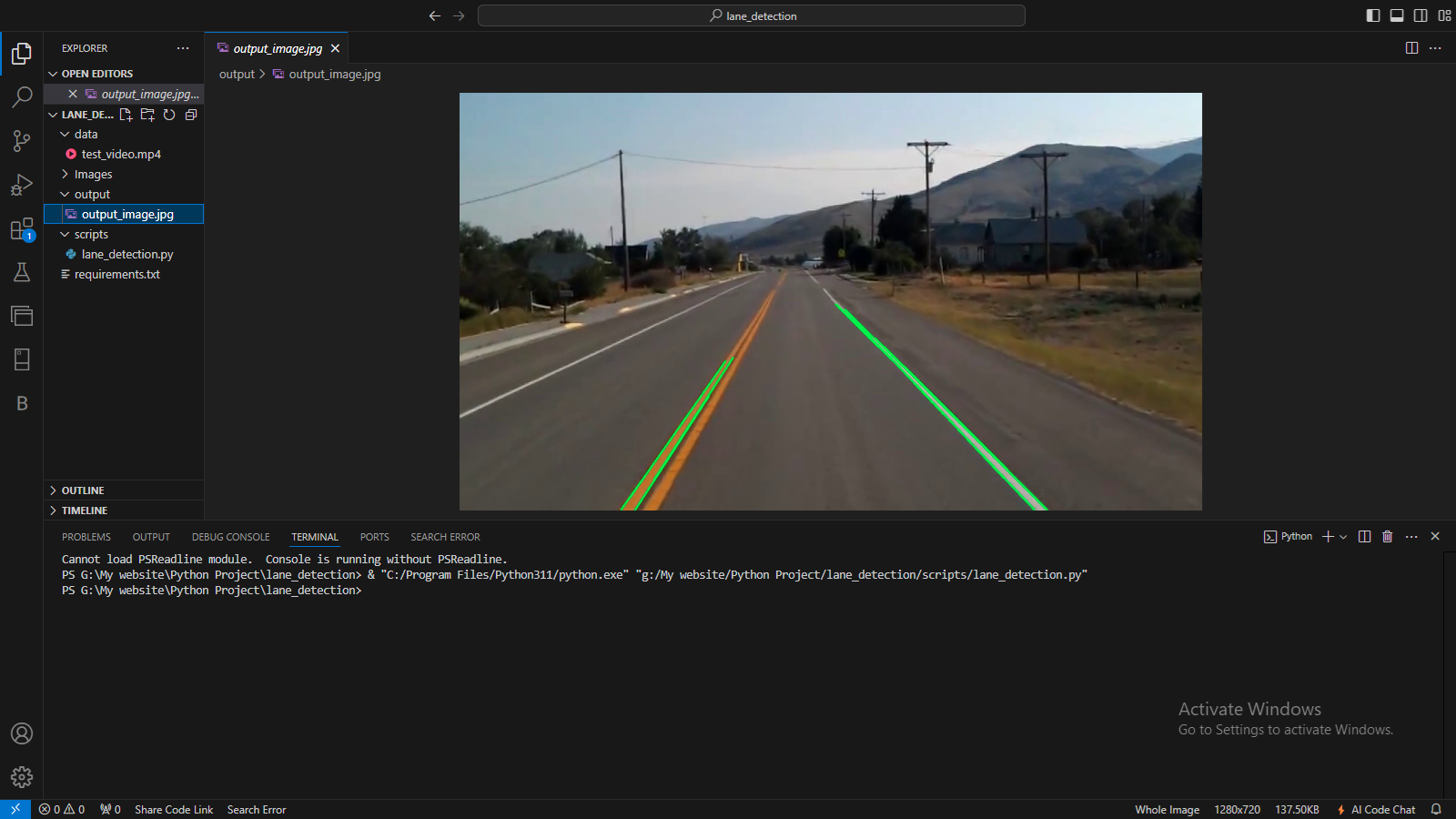
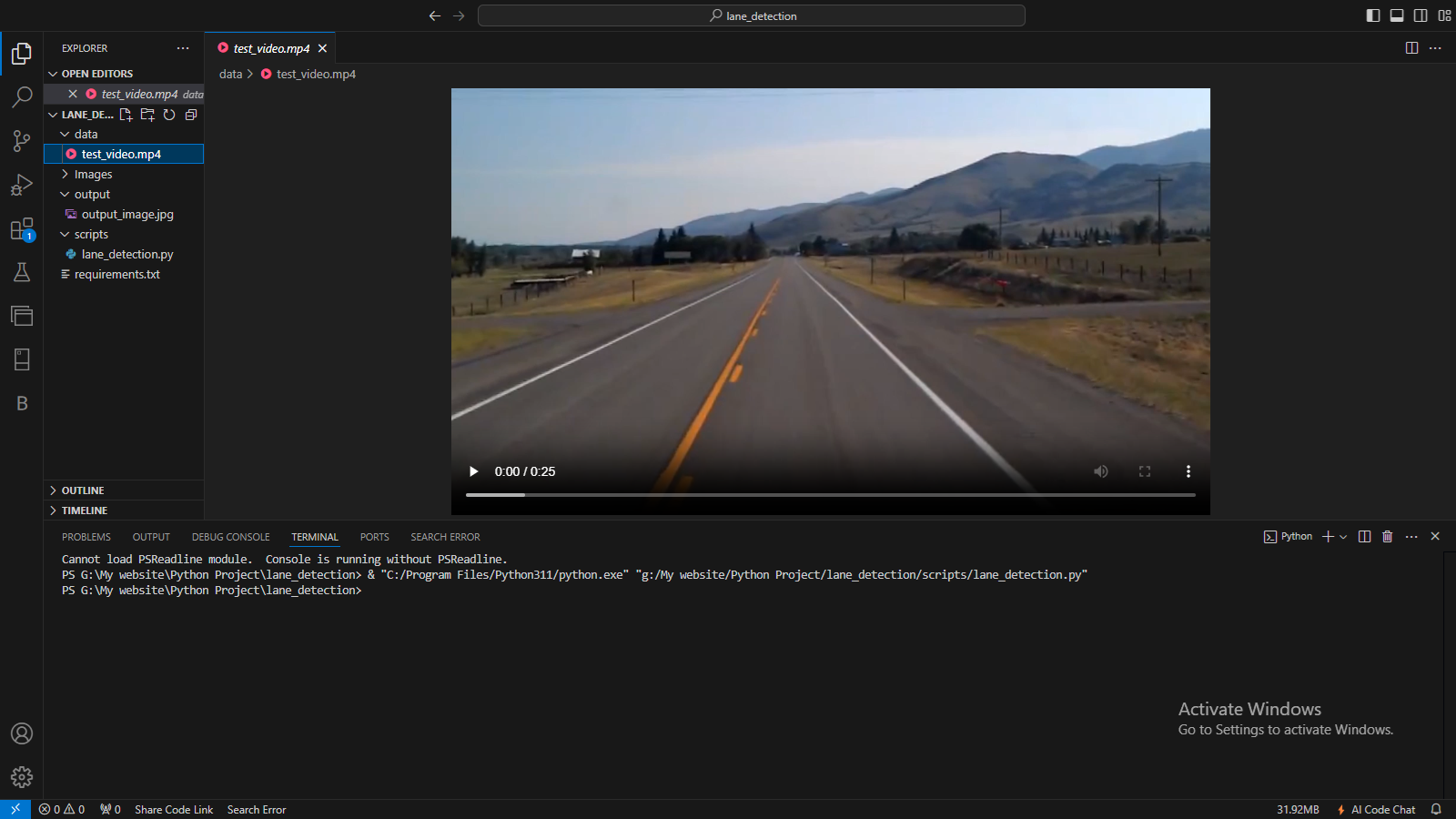
Screenshots